これまで、Wio BG770Aで主に内蔵のLTE-Mモジュールの使い方を調査してきました。 実際には、センサーから読んだ値をSORACOMやAWSなどのクラウドに送信することになるので、今回はSHT40という温度、湿度を測定するセンサーと接続して値を取得してみました。
この記事でわかること
- SHT40をGroveで接続する手順と注意点
- 温度・湿度を取得するコードの書き方
使用機材・環境
| 機材 | 詳細 |
|---|---|
| IoTデバイス | Wio BG770A(Seeed Studio) |
| センサー | Grove - SHT40 温湿度センサー |
| 開発環境 | PlatformIO + VSCode |
Grove対応の温湿度センサーとしてDHT20もありますが、湿度精度がDHT20の±3%RHに対しSHT40は±1.8%RHと高いため、SHT40を選びました。 上位グレードのSHT41は最悪ケースの誤差がより小さいですが、品切れだったため今回はSHT40を使用しました。
本記事で使用したコードはGitHubで公開しています。
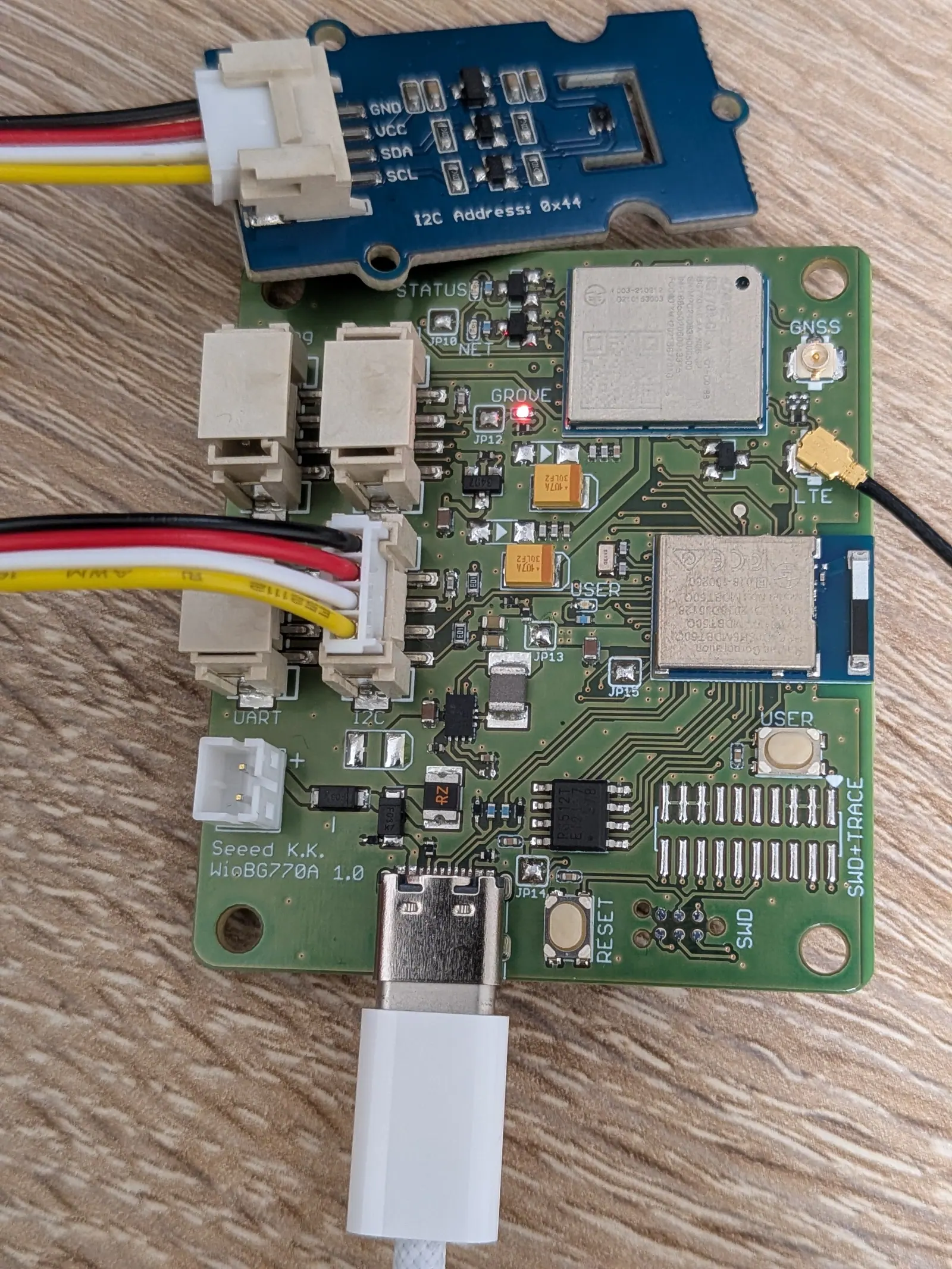
Grove接続:右下のコネクタがI2C対応
Wio BG770AにはGroveコネクタが4つあります。 どれを使っても良いと思いきや、センサーでよく使われるI2Cで接続できるのは右下のコネクタだけです。
SHT40はI2C通信のため、本体右下のコネクタに接続します。
Grove電源を有効化する
Wio BG770AのGroveコネクタへの電源供給は、デフォルトではOFFです。
そのため、プログラムのsetup() で明示的に有効化する必要があります。
digitalWrite(PIN_VGROVE_ENABLE, VGROVE_ENABLE_ON);
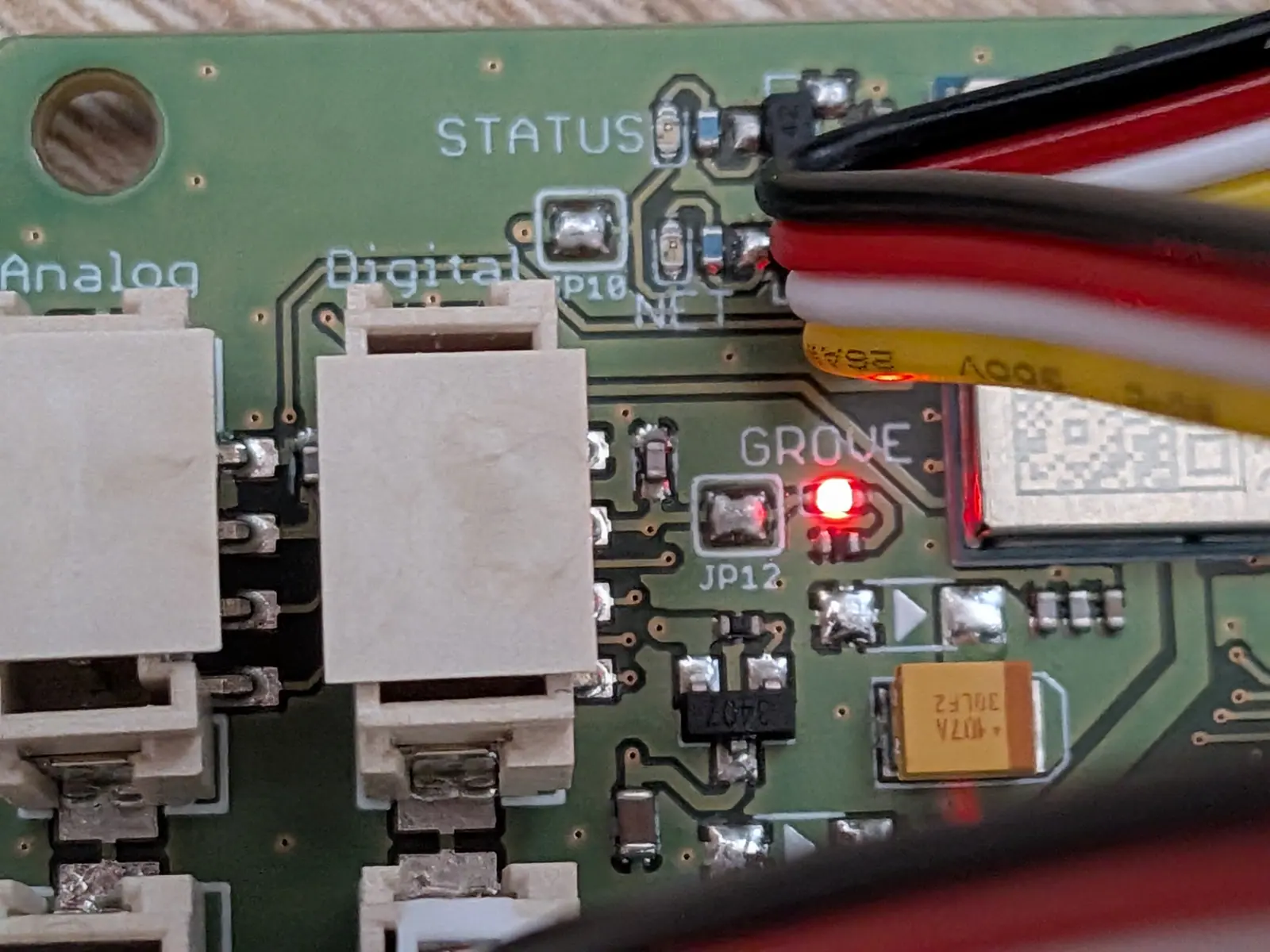
pinMode(PIN_VGROVE_ENABLE, OUTPUT);有効化すると、基板上のGroveエリアにあるオレンジのLEDが点灯します。
その後、Wire.begin() でI2Cバスを初期化します。
Wire.setClock() はI2Cの通信速度を指定するもので、100000(100kHz)は標準モードです。
I2Cには標準モード(100kHz)と高速モード(400kHz)があります。
SHT40は両方に対応していますが、ここでは互換性の高い100kHzを使っています。
Wire.begin();
Wire.setClock(100000); // 100kHz(標準モード)I2Cアドレスを確認する
データシートによると
SHT40のI2Cアドレスはモジュールによって 0x44 または 0x45 の2種類があります。
私が購入したモジュールには本体に 0x44 と書いてありました。
(書いてあるのに気づかず、両方のアドレスで試したりしていました...)
constexpr uint8_t kSht4xAddress = 0x44;温度・湿度を取得する
計測は3ステップです。
SHT40は計測コマンドで繰り返し精度(repeatability)を選択できます。 繰り返し精度とは、同じ条件で連続計測したときの値のばらつき(ノイズレベル)のことです。 センサー自体の絶対精度(±1.8%RH / ±0.2°C)はどのモードでも変わりません。
データシート記載の値は以下のとおりです(計測時間は最大値)。
| モード | コマンド | 計測時間(最大) | 湿度のばらつき | デメリット |
|---|---|---|---|---|
| 高 | 0xFD | 8.2ms | ±0.08 %RH | 計測時間が長い・消費電力が高い |
| 中 | 0xF6 | 4.5ms | ±0.15 %RH | 高モードよりばらつきがやや大きい |
| 低 | 0xE0 | 1.7ms | ±0.25 %RH | ばらつきが最も大きい |
電池駆動で計測頻度を上げたい場合は低モード、値の安定性を重視するなら高モードが向きます。 今回は特に制約がないため中モードを使いました。
- 1
計測コマンドを送る
0xF6(精度中)を送信します。送信後10ms待ってからデータを読み取ります。 - 2
6バイトのレスポンスを読む
温度上位・温度下位・CRC+湿度上位・湿度下位・CRCの順で返ってきます。 - 3
CRCを確認して値に変換する
CRC8チェックでデータの破損を確認してから、変換式を適用します。
SHT40はレスポンスにCRC8チェックサムを含みます。 通信エラーによる誤った値を読まないよう、変換前にCRCを確認しています。
if (crc8(response, 2) != response[2] || crc8(response + 3, 2) != response[5]) {
return false;
}変換式はデータシートに記載されています。
reading.temperatureC = -45.0f + 175.0f * static_cast<float>(temperatureTicks) / 65535.0f;
reading.humidityPercent = -6.0f + 125.0f * static_cast<float>(humidityTicks) / 65535.0f;
if (reading.humidityPercent < 0.0f) reading.humidityPercent = 0.0f;
if (reading.humidityPercent > 100.0f) reading.humidityPercent = 100.0f;変換式の性質上、湿度が0〜100%の範囲外になることがあるため、クランプしています。
この辺りのコードは書くのが大変なので、SHT4xデータシートをAI(GPT-5.4)に渡して生成しました。 コマンド・レスポンス形式・変換式がまとまっているので、こういうのはAIの得意分野ですね。
出力例
SHT4x configured at 0x44 (SCL=D4 SDA=D5)
temperature=19.89 C, humidity=63.15 %RH
temperature=19.93 C, humidity=63.13 %RH
temperature=19.92 C, humidity=63.14 %RH
2秒間隔で取得しています。値は安定していて、ばらつきは0.1°C・0.01%RH以下でした。
まとめ
Wio BG770AとSHT40のセンサーを使って、1時間程度で温度・湿度の取得ができました。
はんだ付け不要でケーブルで接続するだけでセンサーが読めるのは、Grove対応デバイスの大きなメリットですね。 マイコンを動かしてみたいなら、最初の1台はWioやM5StackなどのGrove対応デバイスを選んでおくと挫折することもないでしょう。
以前、Raspberry Pi PicoでBME680と接続した時の記事はこちらです。 センサーをはんだ付けしたり、ブレッドボード上でRaspberry Pi Picoと接続したりと色々やっています。